| Die erste Generation des russischen Satellitennavigationssystems
besteht aus einem militärisch Teil mit Namen Parus (dt. Segel) und
einen damaligen zivilen Teil, welcher Zikada (dt. Heuschrecke)
genannt wurde. Das amerikanische Satellitennavigationssystem
Transit, was
bereits seit 1964 arbeitete, wurde Ende 1996 in den Ruhestand
versetzt, bzw. durch das GPS ersetzt. Der militärische Teil des
russische Navigationssystems ist hingegen bis heute noch in Betrieb,
wenn auch nicht mehr in voller Stärke und auch obwohl Russland das
Nachfolgesystem
GLONASS seit 1993 für die Navigation als offiziell
betriebsbereit erklärt hat. Warum die Parus-Satelliten heute
noch verwendet werden kann man nur spekulieren. Vielleicht ist die
russische U-Boot Flotte noch immer mit den Shkhuna-Empfangsgeräten
ausgestattet und daher wird das veraltete System in
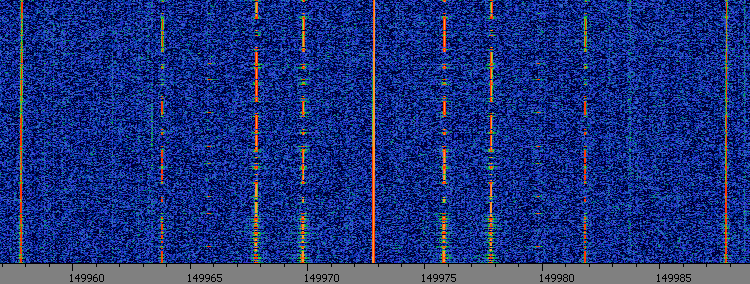
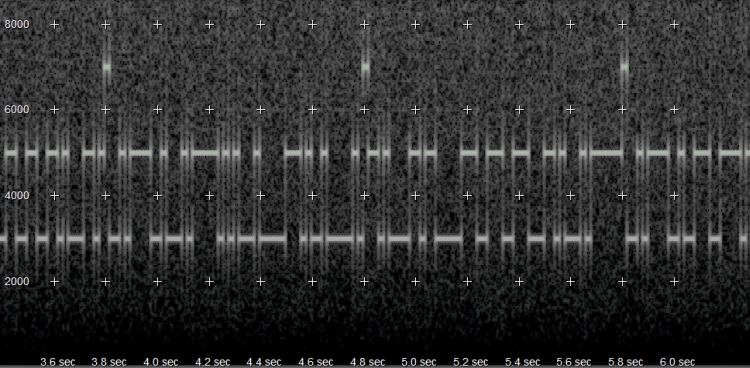
Funktion gehalten. Zwischen 1974-2010 wurden insgesamt 100 Parus-Satelliten erfolgreich gestartet. Pro Jahr wurden ca. 1-5 neue Satelliten in die Umlaufbahn gebracht, da die Satelliten nur eine Lebensdauer von max. 4 Jahre hatten. Im April 2010 wurde der Kosmos 2463 gestartet, welcher als letzter Satellit diese Serie beendet. Nur wenige Tage später nach dem Start, stellte man bei dem Kosmos 2463 eine scheinbare Fehlfunktion des UHF Senders fest. Verteilt über einen Bereich von mehr als 1,8 MHz, gibt es aller 143-kHz-Schritte, Trägersignale einer streuenden Tracking Beacon. Bob Christy hat über seine Beobachtungen auf der Seite Cosmos 2463 - Broken? berichtet. Von den Zikada-Satelliten wurden nur 31 Satelliten zwischen 1976-2002 gestartet. Im November 2003 ist das zivile System deaktiviert worden. Zehn solcher Satelliten bildeten damals das Gesamtsystem, welches aus sechs militärischen Parus-Satelliten, mit einer versetzten Bahnebene von 30 Grad bestand und aus vier zivilen Zikada-Satelliten, die das System mit einer Bahnebene von 45 Grad ergänzten. Da sich die Satelliten im LEO auf einer nahezu kreisförmigen Umlaufbahn in einer Höhe von ca. 1.000 km über der Erdoberfläche befinden, konnte die Wartezeit schon mal mehrere Stunden dauern, bis ein für die Positionsbestimmung geeigneter Überflug stattfand. Die Genauigkeit des Systems für die Positionsbestimmung war vergleichbar mit den Transit-Satelliten und wurde mit ca. 100 Metern angegeben, auch wenn dieser Wert erst bei der Messung von mehreren Überflügen oder mit verschiedenen Satelliten erreicht worden ist.
|