|
Die Sojus (dt. Bund, Union) ist ein russisches
Raumschiff für bemannte Raumflüge. Es bietet Platz für maximal
drei Personen. Der Erstflug von der Sojus-1 mit dem Kosmonauten
Wladimir Komarow fand im April 1967 statt und ging leider
tödlich aus, da sich der Hauptlandeschirm nicht entfalten lies
und die Kapsel fast ungebremst auf dem Boden aufschlug. Seit den
70er Jahren sind die Sojus als Zubringerschiffe für die
damaligen Saljut Raumstationen und später für die Raumstation
MIR im ständigen Einsatz. Bis heute gab es von diesem
Raumschifftyp die fünf großen Weiterentwicklungen: Sojus T, Sojus
TM, Sojus TMA, Sojus TMA-M und Sojus MS. Das Kürzel TMA wird ins deutsche
als Transport Modifikation Anthropometrisch übersetzt. Der
letztere Begriff bedeutet soviel wie nach dem Körper des
Menschen geformt. Ab der TMA Version war die Körpergröße der
mitfliegenden Besatzungsmitglieder weniger auf ein Mindesmaß
beschränkt. Eine Sojus besteht aus drei trennbaren Sektionen.
Dem BO = Aufenthalts-Sektion, dem SA = Landeapparat
(Kommandokapsel) und der PAO = Antriebsaggregats-Sektion. Für
die Besatzung ist nur die Kommandokapsel und die
Aufenthalts-Sektion begehbar, welche zusammen einen Innenraum
von nur 9 m³ bietet. Es gibt zwei verschiedene Aufstiegsbahnen um die ISS zuerreichen. Als Expressflug mit nur 4 Umläufen und einer Dauer von ~6 Stunden, welcher seit der Versionen PM-M und STMA-M möglich geworden ist oder auf die herkömmliche Art mit 33 Umläufen während 3 Flugtage. In beiden Fällen beginnt der erste Überflug nach 2 Stunden und 57 Minuten bzw. bei einen Expressflug nach 2 Stunden und 59 Minuten über West-Europa nach dem Start im Kosmodrom Baikonur in Kasachstan. Die Sojus/Progress befindet sich da im 2.Umlauf. Bei einem Expressflug findet im 4.Umlauf die Kopplung im Sonnenlicht an der ISS statt. Entweder in der Funksicht zu West-Europa oder außerhalb, je nach dem wie die Tag-Nacht-Grenze liegt. Bei einem herkömmlichen Flug ist die Kopplung stehts am 3.Flugtag im 33.Umlauf.
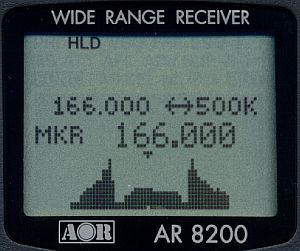
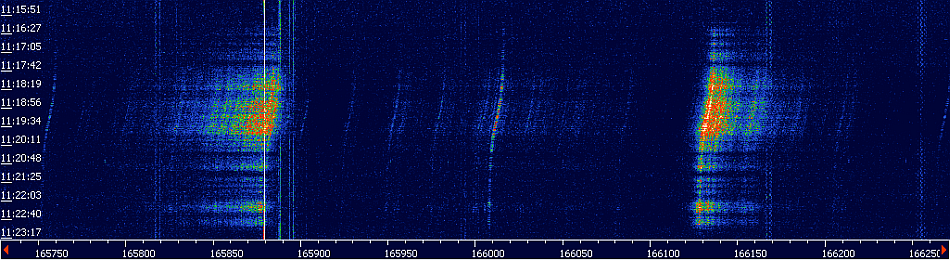
Seit dem Erstflug 1967 eines Sojus-Schiffes war die Frequenz für den Sprechfunk im VHF-Band die 121.750 MHz. Die 143.625 MHz welche noch vorher bei den Wostok und Woßchod Flügen zum Einsatz kam, wurde für die Sojus nicht genommen, da sie als primärer Downlink für die zukünftigen Saljut Raumstationen reserviert worden ist und die 143.625 MHz anders als die 121.750 MHz geschützt in einem weltweit freigehaltenen Frequenzbereich liegt. Die Wahl für die 121.750 MHz kann ich mir nur so erklären, da beim Sinkflug und der Landung die internationale Notruffrequenz auf 121.500 MHz verwendet wird und somit beide Funksysteme ein und die gleiche Antennenkonfiguration nutzen können. Da die 121.750 MHz mitten im internationalen zivilen Flugfunkband liegt, wird diese Frequenz in Russland für den Flugfunk nicht vergeben. In West-Europa hingegen wird diese Frequenz an vielen Flughäfen als Vorfeld-Kontrolle/APRON eingesetzt, so dass es zu Interferenzen vom AM-Flugfunk beim Empfang kommen kann. Die Sojus/Progress nutzen für die Weiterleitung ihrer Signale primär nur die russischen Bahnverfolgungsstationen am Boden oder die ISS wenn sie sich in Funksicht befindet und im Relaisbetrieb arbeitet. Beim Start wenn sich die Sojus/Progress an der Spitze der Trägerrakte unter der Nutzlastvergleitung befindet, werden ihre Antennen darunter abgeschattet. Aus diesem Grund befinden sich an der Außenseite der Trägerrakete in Höhe der Oberstufe Antennen für Rasswet-M auf 121.750 MHz und für Klest-M auf 463 MHz, aber nur beim Start eines Sojus-Schiffes. Eine Antenne für das MBITS auf 166 MHz gibt es sowohl bei Sojus als auch bei Starts von Progress-Schiffen. Nahe des Startplatzes hat die Startkontrolle ihren Sitz, welche sich in einer unterirdischen Bunkeranlage befindet. Darüber auf der Oberfläche steht eine VHF Helicalantenne für die Kommunikation zur Besatzung des Sojus-Schiffes. Ob wohl die VHF Antennen an der Sojus-Trägerrakete linear arbeiten, macht es durch aus Sinn zirkulare Antennen wie eine Helicalantenne zu verwenden. Durch die Änderung der Lage im Flug der Trägerrakete kann es bei einer linearen Empfangsantenne beim wechseln der Ebene bis zu 30 dB Verlust des Signals geben. Bei einer zirkularen Empfangsantenne ist der Verlust beim Empfang von linearen Signalen gleichmäßig gering. |
Sojus TMA-22 © NASA HQ Photo

Sojus TMA-20 © NASA HQ Photo
| Nach rund 9 Minuten Flugzeit nach dem Start erreicht die
Sojus/Progress ihre Umlaufbahn, wo das Schiff nach Brennschluß von
der Oberstufe abgetrennt wird. Danach werden die Solarflügel
entfaltet und die Antennen aufgerichtet. Am hinteren Teil des PAO
befindet sich die aufrecht stehende Rundstrahlantenne ABM-272 für
das Rasswet-M auf 121.750 MHz und gegenüber
die abgewickelte Rundstrahlantenne ABM-282 für das
MBITS auf 166 MHz. (Siehe Bild: Sojus TMA-09M) Bei einem
möglichen Ausfall des VHF-Funksystems kann auch der HF-Sender auf
18.060 MHz in AM für Phonie genutzt werden. Als HF-Antenne verwendet
man in diesem Fall die Rahmenstruktur der Solarflügel. An den Enden der
Solarflügel befinden sich noch weitere Antennen ABM-275 und ABM-276 für
das Kwant-V. Bei der Landung eines Sojus-Schiffes, liegt nur ein Zeitraum von der Abkopplung an der ISS bis zur Landung in Kasachstan von gerade mal 2 Umläufen bzw. ca. 3½ Stunden dazwischen. Dabei entfernt sich die Sojus nur so weit von der ISS, dass sie sich trotzdem noch immer in Funksicht zu ihr befindet. Die ISS übernimmt die Aufgabe als Vermittler und arbeitet im Relaisbetrieb. Dabei wird das MBITS Telemtriesystem der Sojus über das Istochnik-M Monitor-System auf der ISS bis zur Trennung der Sektionen überwacht. Die Rasswet-M Phonie-Kommunikation wird von der ISS über das TDRSS weitergeleitet. Nach dem Bremsmanöver findet in einer Höhe von nur noch ca. 145 km die Trennung der Sektionen BO und PAO von der Kommandokapsel statt. Bis zur Öffnung des Hauptlandeschirms vergehen danach noch ca. 8 Minuten. Während dieser Phase ist die Sojuskapsel im Wiedereintritt, wo die Kommunikation wegen den entstehenden Plasmagase nicht möglich ist. Zwischen der Trennung der Sektionen und dem Aufsetzen am Boden vergehen ca. 23 Minuten. In dieser Zeit steht nur eine in der Einstiegsluke eingebaute ABM-273 VHF-Schlitzantenne zur Verfügung. Dabei wechselt der VHF-Sender von der Space-to-Earth Frequenz auf 121.750 MHz in FM, auf die internationale Notruffrequenz auf 121.500 MHz in AM und aktiviert auf selbiger ein Funkfeuer mit einer Morse-Kode Kennung mit dem Inhalt "A N". Die Sojus empfängt dabei aber weiterhin auf der 130.167 MHz in FM. In einer Höhe von 10,6 km, ca. 14 Minuten vor dem Aufsetzen am Boden wird der Hauptlandeschirm geöffnet. Ab da werden auch die beiden HF-Sender auf 8.364 kHz in AM, ebenfalls mit einem Funkfeuer versehen und auf 18.060 kHz in AM für Phonie aktiviert. Die HF-Antenne ABM-264 des Hauptlandeschirms und die ABM-265 des Reservelandeschirms sind in den Halteleinen eingearbeitet. Wenn die Sojuskapsel gelandet ist und die Leinen am Boden liegen, kann die Antenne nicht mehr effizient arbeiten. Die Besatzung kann dann entweder manuell oder automatisch nach 8 Minuten die kombinierte ABM-279 HF/VHF-Antenne entfalten lassen. Dabei sprengt es seitlich an der Sojuskapsel eine äußere Abdeckung weg und die wie ein Bandmaß aufgerollte Antenne schnappt heraus. Zusätzlich gibt es an der Unterseite der Sojuskapsel noch drei ABM-274 VHF-Antennen, die je nach Untergrund und Lage der Sojuskapsel automatisch entfaltet werden. Falls die ABM-279 Antenne nicht effizient arbeiten kann, gibt es noch eine aufsteckbare ABM-281 HF-Antenne, die an der Einstiegsluke von der Besatzung nach der Landung befestigt werden kann. Über dem Landegebiet kreist ein Flugzeug welches als Relais für die HF/VHF-Kommunikation dient und die Verbindung zu ZUP-Moskau aufrecht hält. Die Such- und Rettungsmannschaften sollen untereinander auf der Air-to-Air Frequenz 122.900 MHz kommunzieren.
|
|
Sojus TMA-22 VHF-Bake auf 121.500MHz |
| Die Sojus und die Progress haben identische Funksysteme die alle vom MNIIRS (Moscow Scientific-Research Institute for Radio Communications) entwickelt und gebaut worden sind. Von den insgesamt sechs Funksysteme für 2-Weg Phonie/Daten-Verbindung, Telemetrieübermittlung, Videoübermittlung, Kommandoempfang, Bahnverfolgung und Kopplungsradar will ich vier näher erläutern. |
| Sojus und Progress HF / VHF / UHF Downlink | |||
Frequenz in MHz |
Nutzung | Modulation | Sendeleistung |
| 8.364 | [Notruf-Frequenz] Funkfeuer mit Morse-Kode | AM | 6 Watt |
| 18.060 | Phonie zu den Such- und Rettungsmannschaften | AM | 11 Watt |
| 121.500 | [Notruf-Frequenz]
Funkfeuer mit Morse-Kode Phonie zu den Such- und Rettungsmannschaften |
AM | 1 Watt |
| 121.750 | Sojus: Phonie nach ZUP-Moskau "Rasswet-M" Progress: manuelles Fernsteuerungssystem "TORU" |
FM | 3 Watt |
| 166.000 | Telemetrie "MBITS" | PCM-FM | 7 Watt |
| 463.000 | Video "Klest-M" | FM | 10 Watt |
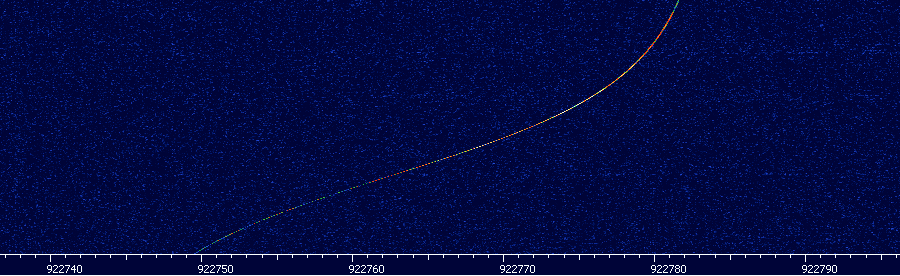
| 922.763 | Bahnverfolgung "Kwant-V" | CW | 4 Watt |
Sojus TMA-09M © Spaceflight.nasa.gov
| Kommunikations-Systeme der Sojus und Progress: Rasswet-M | Klest-M | MBITS | TORU | Kwant-V | EKTS Rasswet-M (dt. Morgendämmerung / "M" steht für dt. Modifikation) ist das Phonie-Kommunikationssystem der Sojus bzw. auch die gleiche Konfiguration für das manuelle Fernsteuerungssystem TORU bei den Progress Zubringerschiffen. Hierbei wird das Woßchod-M VHF-2 Frequenzpaar im Duplex Betrieb genutzt. Die 121.750 MHz ist der Downlink der Schiffe. Der Uplink erfolgt zur Sojus/Progress auf der 130.167 MHz. Entweder über die russischen Bahnverfolgungsstationen mit dem Boden-Empfangssystem "Aurora-VHF" oder bei Funksicht über die ISS. Dies kann während der Annäherung und Kopplung, als auch im autonomen Flug bis kurz vor der Landung sein. In jenen Fall schaltet man die ISS in den Relaisbetrieb und spiegelt sämtliche Phonie-Kommunikation von ZUP-Moskau oder auch vom MCC-Houston via TDRSS zum Sojus-Schiff und zurück. Klest-M ist ein System zur Videoübertragung von
Raumfahrzeugen. Es kommt u.a. bei den Sojus und Progress Zubringerschiffen zum Einsatz, wo
man die Ansicht von der s/w Kamera mit den eingeblendeten Datentafeln, entweder direkt zur
ISS oder zu den russischen Bahnverfolgungsstationen mit dem Boden-Empfangssystem
"Orion" überträgt. Im Fall einer ankommenden Progress ist die
Videoübertragung für das manuelle Fernsteuerungssystem
TORU
unabkömmlich. Klest-M kann aber auch von der ISS verwendet werden, um Videokonferenzen
mit ZUP-Moskau abhalten zu können. Dafür gibt es am Modul Sarja zwei um 180°
angeordnete Kamm-Antennen. Hauptsächlich wird es dann vom russischen Teil der ISS-Crew
oder von Besucher-Crew's bei deren Aufenthalt auf der ISS verwendet. Da Klest-M keinen
Tonunterträger unterstützt, wird das Audio über das
Woschod-M
Phonie-Kommunikationssystem übertragen. Für das frequenzmodulierte Videosignal nutzt man
einen Frequenzbereich ähnlichen dem Kabelkanal S41 mit einer Bandbreite von 6 MHz und
einer RF-Bandbreite von 20 MHz des Trägers. Genutzt wird das Farbsystem SECAM mit 625
Zeilen bei 25 Bildern pro Sekunde. Ab der Serie der Zubringerschiffe Sojus
MS und Progress MS wurde die bisherige analoge Videoübertragung gegen ein
digitales System getauscht.
Derzeit werden bei den Sojus und Progress Schiffen verschiedene Typen von Antennen für das Klest-M System verwendet. Der neue Typ der seit geraumer Zeit bei den Progress-Schiffe zum Einsatz kommt, findet auch als Antenne für das Klest-M System an der 2. und 3.Raketenstufe Verwendung.
Die Sojus/Progress Zubringerschiffe besitzen eine Kamera mit einem starren Blickwinkel nach vorn. Da der Sojus-Kommandant bei der Annäherung und anschließender Kopplung keine direkte Sicht aus einem der Fenster in der Kommandokapsel hat, ist die Kamera die einzige Möglichkeit um das Ziel anzuvisieren. Im Falle das die Kamera einmal ausfällt, gibt es bei der Sojus noch ein Fenster im BO, wo während der Kopplung der 1.Sojus-Flugingenieur seinen Platz hat, der seine Beobachtungen dann zum Sojus-Kommandanten durchsprechen würde. Ähnlich wie bei einem Head-up-Display in einem Kampfjet, werden in dem s/w Fernsehbild noch verschiedene Datentafeln mit eingeblendet, welche wichtige Kopplungsdaten zeigen. Die aufgesetzte Maske mit den Datentafeln ist in 16 Zeilen unterteilt. Es gibt u.a. Datentafeln mit dem Titel "Zadanie Reshimow" (dt. Einstellungs-Modus), "Sblishjenije" (dt. Annäherung) oder "Pritschal" (dt. Kopplungsplatz). |


| Zeile 1: Name der
Datentafel (Annäherung) und Uhrzeit (Moskau) Zeile 3-5 [rechts]: Tele-Orientierungssystem "Regime" alle drei Achsen in Grad/Sekunde Zeile 4 [links]: Angaben des Lenksystems Zeile 5 [links]: Treibstoffreserve in Kilogramm Zeile 7-9 [rechts]: System KURS alle drei Achsen in Grad/Sekunde Zeile 14: Abstand in Kilometer zur Station und Winkelgeschwindigkeit y-Achse Zeile 15: Annäherungsgeschwindigkeit in Meter/Sekunde und Winkelgeschwindigkeit z-Achse |
|

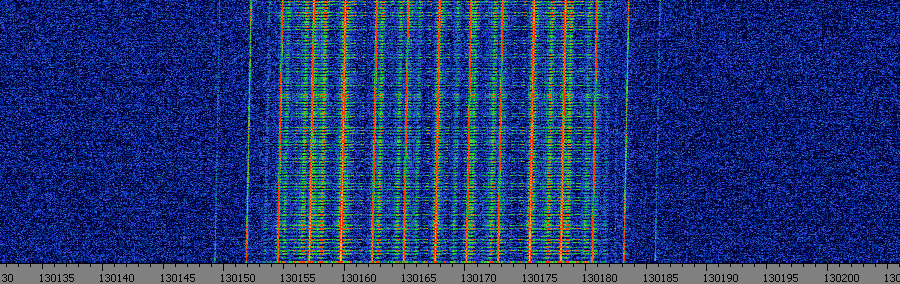
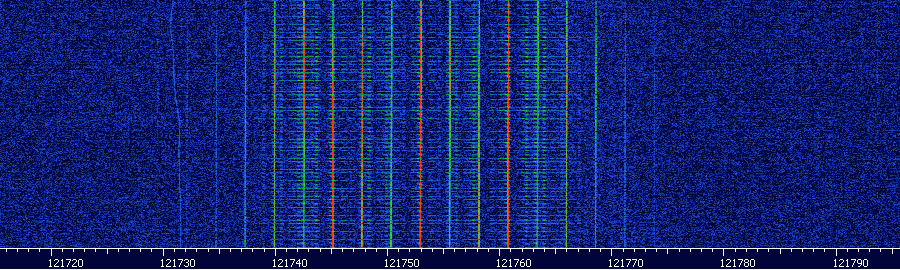
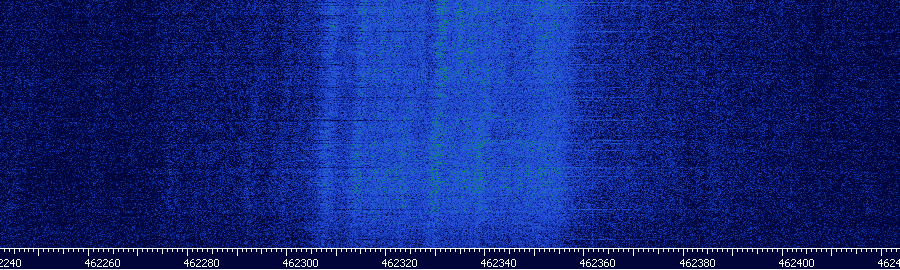
| MBITS (dt. Kompaktes Bord-Information-Telemetrie-System) ist das Telemetriesystem von den neuen Serien der Zubringerschiffe Sojus TMA-M und Progress M-M. Die überholte CPU des Bordcomputers arbeitet jetzt mit fünf analogen Prozessoren. Dies ermöglicht eine wesentlich effizientere Überwachung aller Systeme an Bord der Raumfahrzeuge von ZUP-Moskau, während des Starts und beim autonomen Flug in der Umlaufbahn. MBITS hat das frühere analoge BR-9ZU-8 Telemetriesystem abgelöst, was sich vom Aufbau des Signals mit dem MBITS stark ähnelte. Als Übertragungsstandart wird eine frequenzmodulierte Puls-Code-Modulation mit einer Bandbreite von ±244 kHz verwendet. Dabei typisch sind auch die Signalspitzen auf ±128 kHz. Übertragungssysteme welche die Puls-Code-Modulation verwenden zeichnen sich durch eine hohe Übertragungssicherheit aus. Die angefallenen Messwerte welche in der Zeit gesammelt werden wo keine Funksicht zu einer russsichen Bahnverfolgungsstation besteht, werden an Bord gespeichert und bei Funksicht zu ZUP-Moskau übertragen. MBITS nutzt das von Russland vorgesehene Frequenzband für Telemetrie von Raumflugkörpern zwischen 162.7-252 MHz. | |
|
|
Progress M-13M PCM-FM Signalspitze
|
|
|
|
| TORU (Teleoperatornuij Reschim
Uprawlenija, dt. Teleoperator Betriebs-Kontrolle) ist ein manuelles
Fernsteuerungssystem, was für die Kopplung eines unbemannten Progress
Versorgungsschiffes an die ISS verwendet wird. Es dient als Backup für das
automatische radargestützte Annäherungssystem "KURS". Erstmals kam TORU beim
Versorgungsschiff Progress M-34 im April 1997 zum Einsatz. Beim ersten Test
während eines autonomen Fluges, kam es am 25.Juni 1997 zu einem der
schwersten Unfälle in der Geschichte der bemannten Raumfahrt, in dem die
Progress M-34 unkontrolliert mit dem Modul Spektr der damaligen Raumstation
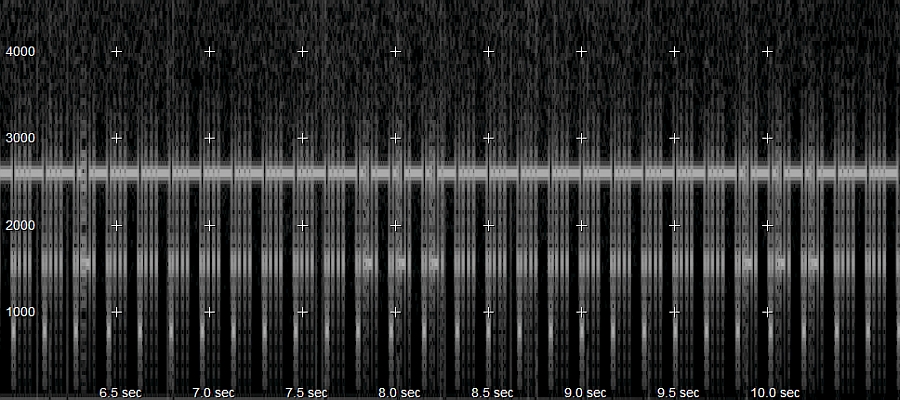
MIR kollidierte. Für die Steuerung eines Progress Schiffes werden die Kommandos über das VHF-2 Frequenzpaar des Woßchod-M Kommunikationssystems übermittelt. Im Modul Swesda befindet sich die TORU-Steuerkonsole, welche mit einem Bildschirm und zwei Joysticks ausgestattet ist. Mit Hilfe der Klest-M Videoübertragung und der eingeblendeten Daten ist es möglich, ein Progress Versorgungsschiff so zu steuern, als würde man in ihm körperlich anwesend sein. Die Steuerbefehle von der Konsole werden in Funksignale umgewandelt und über die 130.167 MHz mit High-Power von der ISS zur Progress gesendet. Das Versorgungsschiff selbst sendet auf der 121.750 MHz dabei eine Art TORU-Rückkanal, wo eine Quittung der Kommandos stattfindet. Die Übertragung hat Ähnlichkeiten mit einem Faksimile-Signal in einer Geschwindigkeit von 360 LPM. Es gab bei den früheren Flügen immer die Gewohnheit am 2.Flugtag nach dem Start einer Progress, im 18.Umlauf einen Funktionstest aller beteiligten Systeme für die bevorstehende Kopplung durchzuführen. Dabei war es möglich kurz nach Funksicht zu den russischen Bahnverfolgungsstationen, dass TORU Signal auf der 121.750 MHz zu hören. |
|
Die Kopplungen finden fast immer in der Funksicht von
West-Europa statt. Entweder am 3.Flugtag im
33.Umlauf oder auch wenn mehr Treibstoff gespart werden soll am 4.Flugtag im
49.Umlauf. Mit dem Versorgungsflug der Progress M-16M im August 2012, wurde
erstmals ein stark verkürzter Expressflug von nur ~6 Stunden und 4 Umläufen bis zur Kopplung
an die ISS erprobt. Die Kopplung findet dabei im Überflug mit der höchsten
Elevation in der Funksicht von Deutschland statt. Während der Annäherung
an die ISS aktiviert die Progress ab einem Abstand von 3 km das TORU
Fernsteuerungssystem selbständig. Von Seitens der ISS wird das TORU 30
Minuten vor dem geplanten Kopplungszeitpunkt automatisch aktiviert. Erst ab einen Abstand von 400
Meter kann der Operator in der ISS die Kontrolle über das Progress
Versorgungsschiff übernehmen. Es kann vorkommen wenn es einen zeitigen
Erdschatteneintritt gibt, dass schon wenige Minuten vor dem Beginn des
Überfluges gekoppelt
wird, um die Annäherung unbedingt bei Sonnenlicht durchzuführen. In dem Fall
ist das TORU da schon oftmals über West-Europa deaktiviert.
|
|